تعارف
1960 جي ڏهاڪي جي آخر ۽ 1970 جي شروعات کان وٺي، اڪثر روايتي فضائي فوٽوگرافي سسٽم کي هوائي ۽ خلائي اليڪٽرو-آپٽيڪل ۽ اليڪٽرانڪ سينسر سسٽم سان تبديل ڪيو ويو آهي. جڏهن ته روايتي فضائي فوٽوگرافي بنيادي طور تي نظر ايندڙ روشني جي طول موج ۾ ڪم ڪري ٿي، جديد هوائي ۽ زمين تي ٻڌل ريموٽ سينسنگ سسٽم ڊجيٽل ڊيٽا پيدا ڪن ٿا جيڪي نظر ايندڙ روشني، عڪاسي ٿيل انفراريڊ، تھرمل انفراريڊ، ۽ مائڪرو ويڪرو اسپيڪٽرل علائقن کي ڍڪيندا آهن. فضائي فوٽوگرافي ۾ روايتي بصري تشريح جا طريقا اڃا تائين مددگار آهن. اڃا تائين، ريموٽ سينسنگ ايپليڪيشنن جي وسيع رينج کي ڍڪيندي آهي، جنهن ۾ اضافي سرگرميون شامل آهن جهڙوڪ ٽارگيٽ ملڪيت جي نظرياتي ماڊلنگ، شين جي اسپيڪٽرل ماپ، ۽ معلومات ڪڍڻ لاءِ ڊجيٽل تصويري تجزيو.
ريموٽ سينسنگ، جيڪو غير رابطي واري ڊگهي فاصلي جي ڳولا جي طريقن جي سڀني پهلوئن جو حوالو ڏئي ٿو، هڪ طريقو آهي جيڪو برقي مقناطيس کي استعمال ڪري ٿو هڪ ٽارگيٽ جي خاصيتن کي ڳولڻ، رڪارڊ ڪرڻ ۽ ماپڻ لاءِ ۽ تعريف پهريون ڀيرو 1950 جي ڏهاڪي ۾ تجويز ڪئي وئي هئي. ريموٽ سينسنگ ۽ ميپنگ جو ميدان، ان کي 2 سينسنگ موڊس ۾ ورهايو ويو آهي: فعال ۽ غير فعال سينسنگ، جن مان لِڊر سينسنگ فعال آهي، پنهنجي توانائي استعمال ڪندي هدف ڏانهن روشني خارج ڪرڻ ۽ ان مان ظاهر ٿيندڙ روشني کي ڳولڻ جي قابل آهي.
فعال ليڊر سينسنگ ۽ ايپليڪيشن
لائيڊار (روشني جي ڳولا ۽ حد بندي) هڪ ٽيڪنالاجي آهي جيڪا ليزر سگنلن جي اخراج ۽ وصول ڪرڻ جي وقت جي بنياد تي فاصلي کي ماپيندي آهي. ڪڏهن ڪڏهن ايئر بورن لائيڊار کي ايئر بورن ليزر اسڪيننگ، ميپنگ، يا لائيڊار سان مٽائي استعمال ڪيو ويندو آهي.
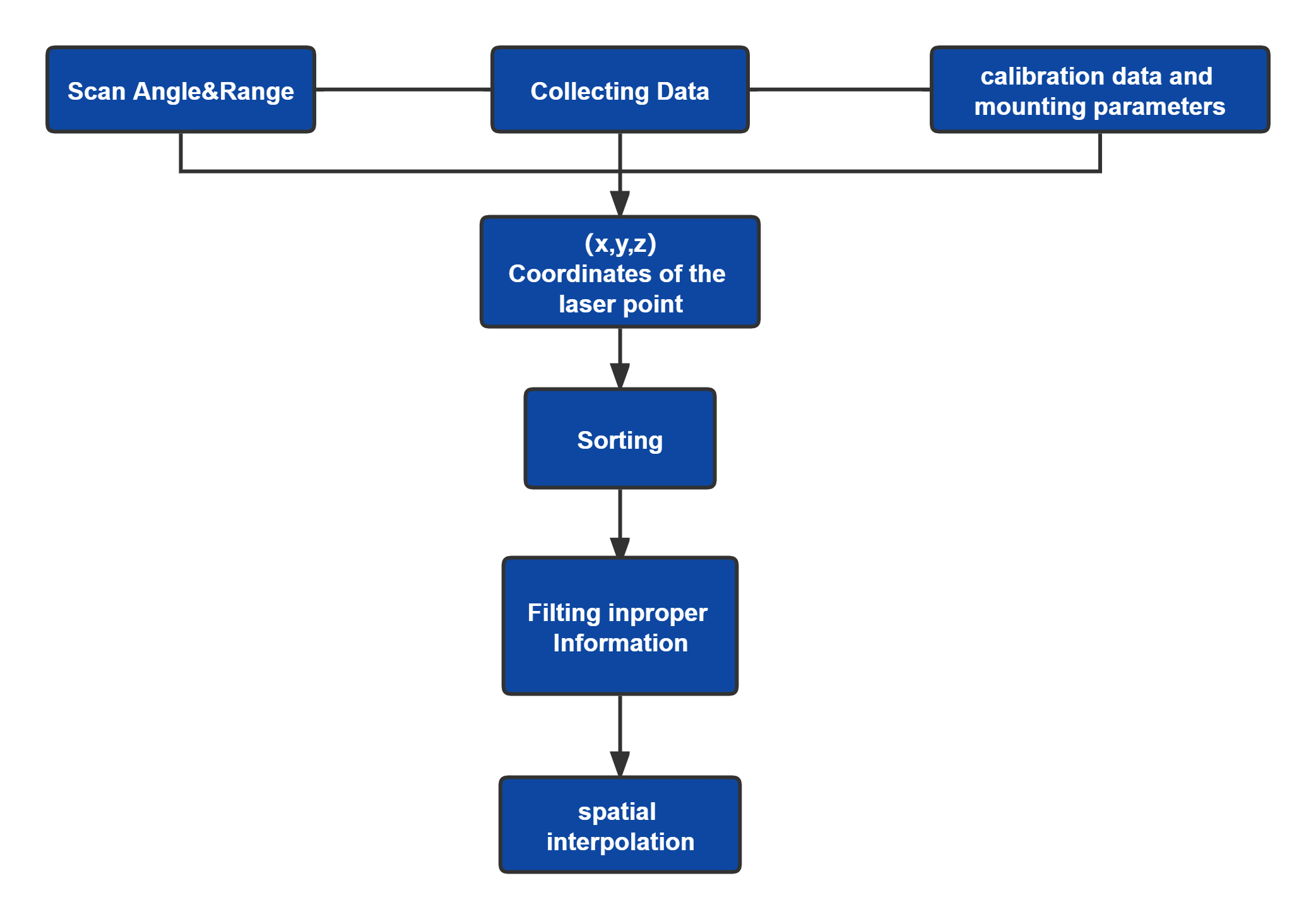
هي هڪ عام فلو چارٽ آهي جيڪو LiDAR استعمال دوران پوائنٽ ڊيٽا پروسيسنگ جا مکيه مرحلا ڏيکاري ٿو. (x، y، z) ڪوآرڊينيٽس گڏ ڪرڻ کان پوءِ، انهن پوائنٽن کي ترتيب ڏيڻ سان ڊيٽا رينڊنگ ۽ پروسيسنگ جي ڪارڪردگي بهتر ٿي سگهي ٿي. LiDAR پوائنٽس جي جاميٽري پروسيسنگ کان علاوه، LiDAR فيڊ بيڪ مان شدت جي معلومات پڻ مفيد آهي.
سڀني ريموٽ سينسنگ ۽ ميپنگ ايپليڪيشنن ۾، LiDAR کي سج جي روشني ۽ ٻين موسمي اثرن کان آزاد وڌيڪ صحيح ماپون حاصل ڪرڻ جو هڪ خاص فائدو آهي. هڪ عام ريموٽ سينسنگ سسٽم ۾ ٻه حصا شامل آهن، هڪ ليزر رينج فائنڈر ۽ پوزيشننگ لاءِ هڪ ماپ سينسر، جيڪو سڌو سنئون 3D ۾ جاگرافيائي ماحول کي جاميٽري تحريف کان سواءِ ماپي سگهي ٿو ڇاڪاڻ ته ڪا به تصوير شامل ناهي (3D دنيا 2D جهاز ۾ تصوير ڪئي وئي آهي).
اسان جو ڪجهه ليڊر ذريعو
سينسر لاءِ اکين لاءِ محفوظ LiDAR ليزر سورس چونڊون


